齣品|虎嗅科技組作者|宇多田頭圖|受訪者提供 王世瑋(中)與探維清華大軍 激光雷達軍團裏,冒齣一個清華幫 - 趣味新聞網

發表日期 3/10/2022, 8:58:07 AM
齣品|虎嗅科技組
作者|宇多田
頭圖|受訪者提供,王世瑋(中)與探維清華大軍,背後是即將齣貨的激光雷達
2022年初,Velodyne亞太區負責人翁瑋悄然離職。
這個在2016~2018年統治中國自動駕駛市場長達3年的美國激光雷達巨頭,在董事會捲入長達兩年無休止內鬥、固態産品研發陷入停滯後,徹底拱手讓齣中國市場。
與此同時,因反嚮拆解Velodyne産品而登上自動駕駛曆史舞台的速騰、禾賽等中國大多數激光雷達廠商,也走到瞭一個必須依靠自己力量與速度,而非“逆工程能力”纔能活下去的關鍵節點。
一方麵,自動駕駛巨大的炒作推力、華為的攪局,讓激光雷達成為車廠們 “幻想超越特斯拉” 的不二選擇;而另一方麵,雖然用於避障與測繪的激光雷達在工業界已存在20餘年,但 能嵌入車裏的固態激光雷達卻需要被重新定義與構建 。
機械激光雷達因復雜的係統構造顯然過不瞭車規,純固態路綫尚未成熟,混固態路綫成為大多數公司的選擇,但成本仍未降至車廠最佳預期。
換句話說,即便是2022年當下,也沒有堪稱完全閤格的車載激光雷達。
在所有技術路綫都未跑齣的狀態下,很多創業公司再次嗅到瞭吞食巨大蛋糕的新機會:國外,包括已上市的Luminar、Ouster等數十傢固態公司蓄勢待發;國內,除瞭大疆、速騰、禾賽、一徑等堅持下來的佼佼者,一支掌握著多項固態專利的清華博士團隊,也準備加入混戰。
清華實驗室的“固執”
早在2017年,有遠見的創業者們從奧迪A7上那顆法雷奧生産的4綫激光雷達上,就嗅到瞭擺脫Robotaxi狹窄市場束縛的商機。如果迴看當年的媒體報道,錶達“固態激光雷達上車量産願景”的中國創業者聲音不絕於耳。
就是在那樣一個極具市場誘惑力的時間點,王世瑋跟4個清華精儀係兄弟,在2017年一次年後的聚會上,“用10秒鍾思考時間”做齣瞭成立一傢公司――探維科技的決定。
其中,有十幾年激光雷達開發經驗的CTO鄭睿童博士,他是固態激光雷達和圖像融閤技術的開創者;有總工程師張正傑,他除瞭是清華大學及德國亞琛工大雙學位碩士,也擁有一雙切割金屬的“黃金手”,曾任中國中車二七裝備有限公司技術總監。
而被推上CEO位置的王世瑋,作為曾參與過國傢重大秘密衛星項目的光學專傢,其真正對汽車供應鏈有瞭全麵認識的時間點,則是在2016年加入信通院參與汽車零部件標準製定以後。
“這波大潮來瞭,沒有人會無動於衷。在成立探維前,我們都已經工作瞭好幾年,被技術與市場碾壓過幾輪,很多事情已經考慮得非常充分。”
他們覺得在實驗室和超淨間裏搗鼓瞭十幾年雷達與光學儀器,對相關技術輕車熟路,便也能跟法雷奧一樣,未來拿下車廠的韆萬訂單。
然而,接下來的兩年,情況急轉直下――沒有成熟的量産技術,更沒有市場。
“在華為沒有明確說要上固態激光雷達之前,其實整個産業都呈一個觀望狀態。那時機械式雷達‘統治’自動駕駛市場,而固態路綫不僅存在一堆技術問題,還沒有市場。”
王世瑋記得,2019年之前,高階自動駕駛隻需機械産品就能滿足,而汽車産業隻是“雷聲大雨點小”――傳統車廠們還停留在思考“蔚小理”能不能活下來的暗諷期。
因此,當2019年,高階自動駕駛步入第一個寒鼕時,隻有一條大腿可抱的激光雷達公司處境也變得極為艱難。
“這本質仍然是一個先有雞還是先有蛋的問題。”兩年時間裏,他們隻得先做16綫混固態産品,打入能提振銷量收入的非汽車産業。
“情況當然不好,因為固態那時候根本不是剛需,即便測試也隻是齣貨一小批,車廠根本起不瞭量。最壞的時候……應該是2019年底,如果最新一筆融資沒到賬,我們連買機票去美國參加CES都捉襟見肘。” 王世瑋對於那時候的境遇隻是輕描淡寫,覺得創業沒成功沒必要渲染任何情緒。
“求存肯定是要先求存,但好在幾個閤夥人都‘軸’,對,我們就是不改路綫。如果說我們哪裏最特彆,可能是我們從來沒改過技術路綫,我們就是要做固態。”
這句話的確道齣瞭那時候整個産業的技術趨勢與混亂狀態。
作為激光雷達産業長達6年的觀察者,筆者看到,大部分創業公司幾乎把機械、半固態以及固態摸索瞭個遍。但為瞭生存,不得不先把“機械式雷達做到國産替代”。
而傳統工業級激光雷達製造商,也都是以機械式雷達見長,他們一邊驕傲地與Velodyne的64綫機械産品一較高下;一邊照搬法雷奧唯一車規産品的技術路綫以求上車。
但並不是所有創業者都像王世瑋團隊一樣幸運。
2019年前後,若乾傢曾拿到融資的激光雷達創業公司宣布“關門停運”;而那些從工業與測繪産業試圖跨入車載行業的“老派”激光探測器製造商,沒有一個成功跑齣來,便縮迴瞭原來的賽道。
有産業人士嚮我們陳述瞭一個不少公司放棄車載研發的觀點:“很多公司一聽華為要進來瞭,像泄瞭氣的皮球一樣,工程師也覺得技術沒戲,投入太大,不如迴到他們擅長的舒適區,繼續搞工業和測繪。”
這個想法十分有趣,因為有頭部公司持有的另一個觀點恰恰相反:“恰恰是華為進來瞭,說明這個方嚮和市場特彆有戲。 跟強者競爭,纔像個‘男人’ 。”
但誰也沒有想到,僅僅兩年時間,便再次迎來瞭2021年的劇變與爆發。
王世瑋迴憶,2021年後與車廠的接觸驟然增加,投資人也主動找上門,而後者的判斷依據幾乎隻有一個――這是個跟汽車産業顛覆性變革緊密相關的賽道。2021年9月,他們順利完成超1億元A輪融資,再無經曆此前“找錢”的坎坷。
一切都變得更加有趣。
這個因自動駕駛概念而爆火的零部件,雖然至今沒有人說清楚它跟汽車銷量在未來5年裏有什麼必然聯係,但它卻已經與“芯片”一起,成為唯二能跟車廠大佬“直接對話”的Tier2廠商。
而上一輪的“清洗”,直接導緻這一波的車載激光雷達競爭者驟然減少,畢竟産業內有公司“硬抄”德國激光雷達係統商Sick産品都用瞭5年, 這個硬件賽道也逃脫不瞭半導體與汽車産業的發展定律 。
如今,在國內,有一定固態技術與量産經驗的公司,除去華為與大疆,一個巴掌可以數齣來;而另一邊,超過10傢國外車載激光雷達廠商,則在最高難度的混固態與純固態賽道上皆有部署。
而這份不長的固態激光雷達友商列錶裏,王世瑋的團隊終於可以有一席之地 。
固態技術之爭
一說車載激光雷達,多數人想到的必然是無人駕駛汽車上那坨巨大的鋼鐵陀螺,那便是機械式産品的典型形態之一。鑒於車廠絕不會賣給你一輛“頭頂腫瘤”的消費級轎車,那麼他們對車規級激光雷達雷達的特殊要求也就變得直觀和很好理解瞭:
體積、穩定、量産、成本。
小馬智行的Robotaxi,激光雷達通常架在車頂
但像開頭說的,由於Velodyne是機械式激光雷達鼻祖,這使得機械式“從0到1”的部分已完成,纔有瞭中國後進者一哄而上把1以上的部分逐漸纍積完善,最終把市場拖入價格戰;
而要打入汽車供應鏈的固態産品, 則需要從上麵極為嚴苛的4個維度做創新和減法,從産品角度來看,一切又迴到瞭0。
因此,現實情況是,車廠雖然因“自動駕駛”而建立瞭一套相對成熟的激光雷達認知體係,但迄今卻沒有統一檢驗與應用標準。
據一位對激光雷達十分熟悉的産業人士迴憶,2019年之前,國內車企老闆一開始覺得激光雷達這個東西很簡單――“不就是像加攝像頭一樣嘛”。但後來發現下麵的團隊沒人能搞明白,這個東西怎麼加。
“確切地說,2018~2019年是車廠的學習期,那時不少國內外車廠建立瞭激光雷達項目組,廣招人纔,研究到底上激光雷達要怎麼用,包括‘裝在什麼位置’。”
他認為,那時國外車企走的相對更快,畢竟最早這個産業源自歐美,法雷奧的産品最早過車規,奧迪最先裝車,通用與福特那時也在跟激光雷達公司進行密切接觸。但是,從2019年後的産品進度和概念普及度來看,國外的確輸給瞭中國速度。
一方麵,由於性價比等多重因素, 國産激光雷達正在逐步替代國外産品 。譬如,某知名傳統車廠就準備將原來使用ibeo激光雷達的品牌綫換成一傢國內廠商産品;
另一邊,車廠積纍瞭充分測試經驗後,不再輕易被“那些好看的探測距離、視場角、分辨率、光乾擾等産品參數”欺騙。
舉個例子,以前各傢激光雷達廠商都會將探測距離寫到100米200米300米,數字越大越好,但現在,車廠基本都清楚“這個數字究竟能在什麼樣的環境條件下能測齣來”,檢測目標都有哪些特點,白天和黑夜的光綫乾擾會造成多大的效果差彆。
“某國産雷達廠商産品可以做到在200m探測10%反射率的物體,已經很好瞭。一般10%的反射率相當於黑色輪胎,通常都會拿這類反射率低的目標物做一個最低標準。” 王世瑋認為,現在的車廠都不是小白,對“橫評”輕車熟路。
“而且車廠問我們的問題,通常簡單粗暴――你價格能比XX便宜多少?”
小鵬P5的激光雷達(左前方)拍攝自2021年4月上海車展
然而,正是激光雷達在供應鏈中的權重逐步增高, 新的問題隨之産生 。
截止目前,曾經高喊會因規模化而降至500元單價的車載激光雷達, 成本仍高至幾韆人民幣,部分産品的生産工藝良品率也不高 ;從穩定性看,所謂“過車規”, 隻有舊體係的一套指導原則在發揮基礎作用。
“2017年奧迪用Scala激光雷達的時候,車規究竟是什麼樣子,其實也是奧迪自己說瞭算。當然,在環境穩定性方麵會有一個行業共識,畢竟攝像頭和毫米波雷達都要做環境穩定性測試。
但激光雷達在車上的檢測率、識彆效果,甚至是與攝像頭等多種傳感器的配閤度,其實行業並沒有統一的性能評測標準。”
王世瑋在跟車廠溝通中,發現不少客戶已經具備瞭初步成熟的測試體係,或者從一級供應商那裏做瞭很多藉鑒,但的確缺乏標準性。
有人曾嚮我們透露, 2021年一傢新勢力所謂上瞭兩台激光雷達的量産車型,車頭的激光雷達幾乎沒有發揮作用 。簡單來說,就是作為“車體裝飾”。這種尷尬的營銷性配置,也許未來仍會在其他車型上重演。
此外,有人稱ibeo的量産産品雖然在體積上做到瞭跟iPhone一樣大小,但卻在散熱方麵不及預期;而MEMS型産品(這是一種有名的混固態技術路綫之一)的車規驗證並不完備,在穩定性上還有待提升。
本質上,這些問題還是在於車載固態激光雷達産品在四個維度上都不夠成熟。
激光雷達按照“掃描方式”的分類
事實上,我們經常把激光雷達稱為“機械、混閤固態和固態”的技術路綫劃分方式,主要判斷依據是 “掃描模塊是否會動,動的部分有多少”。
而這也是當下激光雷達過車規最大的技術難點之一。
從長遠來看,純固態一定是主流路綫(譬如芯片級産品穩定性肯定最強)。但如今,無論是Flash還是OPA,所有固態技術尚不成熟――或造價高昂或探測距離短。而國外研發此技術的公司均無好消息。
迄今為止技術路綫沒有誰輸誰贏,各有韆鞦。圖片來自民生證券
因此,大多數希望盡快走入汽車供應鏈的企業,都選擇瞭混閤固態技術路綫。
在這個區間裏,不少廠商選擇的是MEMS或其他雙軸振鏡技術方案。但是,在探測距離和環境穩定性上,仍然還存在難以兼得的狀態,需要繼續實現工藝突破。
實際上,有産業人士曾告訴我們, 在所有光學掃描方案裏,反射式的單軸掃描是最經典、最穩定、最容易過車規的方案,同時也是最返璞歸真的方式。 這也是為何包括法雷奧、禾賽等頭部廠商都在混閤固態區間內選擇瞭這一形態。
“但單軸也有很大的問題,就是怎麼做到在控製體積的同時做到‘多綫’,實現3D效果。” 王世瑋指齣,傳統單軸振鏡與轉鏡産品大多都是單綫雷達(當然也有法雷奧Scala這樣的4~8綫産品),因此,就需要在其他部分做更多創新。
他提醒我們,由於市麵上總是關注於激光雷達的掃描係統,恰恰就忽視瞭它另外三個重要組成部分―― 發射、接收以及信號處理電路。
“激光雷達比我們想像得要復雜太多, 掃描部分在激光雷達結構裏的占比其實並不高 。而 激光器與接收器 ,都在經曆著跟成本與性能密切相關的技術變革。”
王世瑋指齣,即便他們掃描模塊走的是 單軸微振鏡路綫 ,但在給收發模組做“陣列化”創新後,除瞭做齣多綫效果,也要將光學裝調難度降到瞭最低――
在器件數量大幅減少的前提下,組裝調試時間用幾分鍾來完成。
“我們的一個核心技術突破,是在收發模組層都采用瞭陣列化的集成器件,直接保證瞭探測分辨率從第一代16綫産品突破迭代到64綫,一直到現在的192綫固態版本。” 由於收發係統細節涉及到技術專利,他隻能透露基礎信息。
“簡單說,就是用低成本、更穩定的單軸,做到瞭多綫的感知效果。”
在收發係統層麵的技術革新趨勢,圖片來自民生證券
直到現在,我們纔意識到,雖然每傢激光雷達企業的産品,在各種報道中,都會被簡單概括為某一種掃描形式 。但事實上,由於激光雷達由上百種光學、電子器件組成,復雜度極高,遠遠不是“固態與非固態”可以代錶的。
甚至於,每傢公司在 光學設計、信號處理、集成方式、收發器件品牌與價格 選擇上,都會有極大的差彆。
舉個例子,在收發係統的設計上,激光雷達廠商大多會采用APD技術(上圖),而現在有往單光子器件SPAD發展的趨勢,但 量産芯片化 與 性價比 還有不足,國內也僅有幾傢公司在做相關産品。
因此,我們並非貿然下瞭這樣一個市場結論:
第一批上車的激光雷達,雖然為車廠們卯足瞭噱頭,但實際效果應該遠低於其宣稱的物體檢測與感知能力;
而車載固態激光雷達之爭,在固態産品走嚮成熟、混固態産品成本持續降低、量産能力持續爬坡的3年裏,仍然不會有一個明顯的高下之分。
硬件融閤大勢不可逆
就像在半導體世界裏,多塊XPU融閤的超異構計算創新掀起瞭第四代算力革命一樣,在自動駕駛汽車上,既然數據要在新舊傳感器之間穿梭與碰撞,打破瞭原有模塊化的獨立運行機製,那麼必然就會打破硬件與硬件之間的“隔閡”。
因此,硬件融閤趨勢,也發生瞭如今每天能夠加載1000萬條代碼的消費級汽車上。
早在2008年,王世瑋在清華精密儀器與測量實驗室裏,連過年都在忙著為一個國傢衛星項目做圖像與點雲數據融閤技術時,肯定想不到,十幾年後,一項與之極為類似的技術會對自動駕駛和汽車産業有如此重要的作用。
多傳感器融閤。 這是一個在車上為激光雷達、攝像頭、毫米波雷達等多種傳感器“建立聯係通道”,並為汽車大腦做信息預處理的關鍵步驟。
如果打個比方,這是一種“ 讓汽車自動駕駛前,先把零部件們放進一個語言體係裏對話 ”的能力。
一般情況下,一輛robotaxi的傳感器分布
然而現實很骨感。這項自動駕駛相關的高級技術,遠遠未被汽車産業領會、消化和吸收。
“大多有自動駕駛業務或團隊的公司,在做傳感器數據融閤時,都采用的後融閤處理方案――攝像頭生成圖像的數據,激光雷達生成自己的點雲數據,分彆做感知,再交給主處理器做融閤。”
一位熟悉融閤技術的工程師告訴我們,最常見的方法是把各類傳感器的綫都接在一塊闆子上,然後做標定和處理。
“但這種方法精度有很大問題,車上不同位置的傳感器在空間與時間上很難對齊。而且一旦圖像齣現誤識彆,你就得去檢查一下激光雷達的‘看法’,如果後者給瞭一個相反的判斷,那麼你該選擇誰?這事兒永遠都得人為介入,或者預先製定規則,但也難免發齣錯誤指令。”
他舉瞭個例子,某車廠在車頭兩邊塞瞭兩個激光雷達。但很明顯,車後的攝像頭與兩顆激光雷達的位置和方嚮完全不同,掃描角度韆差萬彆,通過“後融閤”在精度上毫無疑問會有缺損。
而“前融閤”可以解決以上問題。
這種方法的特點在於, 把多個傳感器的原始數據先“揉搓”在一起,再扔在一個“神經網絡大鍋”裏做感知訓練 。這就好比把多個硬件組閤在一起,形成一台“超級傳感器”――不僅能看到圖像,也能看到紅外綫和點雲數據。
這項技術在國內最有名的傳播者和實踐者,是曾經的明星高階自動駕駛公司Roadstar(很遺憾,這傢公司因內鬥而解散),其首席科學傢、也是後來成立瞭元戎啓行的周光,曾詳細介紹過“前融閤”的精度優勢:
“假設在你手上有個手機,激光雷達隻能看到手機一個角,攝像頭隻能看到第二個角,毫米波雷達可以看到第三個角。如果用後融閤算法,由於每個傳感器隻能看到一部分,因此物體非常有可能不被識彆,最終被濾掉。但在前融閤中,由於它集閤瞭所有數據,相當於可以看到這個手機的三個角,那對於前融閤來說,是非常容易能夠識彆齣這是一台手機的。”
探維把激光雷達與攝像頭以特殊方式“融”在瞭一起
但是,前融閤方案在開發中會遇到很多技術難題。譬如開發與前融閤數據相試配的感知算法。對於車載傳感器係統來說, 想通過係統標定達到一百米外3~5厘米的融閤精度,是一個幾乎不可想象的技術指標。
王世瑋也極為推崇“前融閤”這項對汽車自動駕駛能力至關重要的技術。但是,除瞭無可比擬的感知精度優勢,在清華實驗室為國傢做過大型衛星前融閤項目後, 他認為對於汽車産業來說,保證係統“後續無人介入”更為重要。
“與汽車不一樣,衛星有個苛刻的客觀前提:你一旦發射瞭,就很難再去修正一些問題。這也就要求我們當時必須做到,讓産品在無人化狀態下實現一切自動化有序工作。”
他舉瞭個有意思的例子,當年美國哈勃望遠鏡發射上天後,科學傢纔發現它裏麵有塊鏡子不太好,看東西很模糊。但解決方法隻有一個,就是再重新發一顆衛星上去,裝一個補償鏡。
“我們當時做國傢項目,不可能都像哈勃望遠鏡一樣,不斷發新衛星去維修,因此就必須保證衛星在無人狀態下自動化處理信息。而這就是我們當初采用‘前融閤’技術的另一個重要原因――必須讓係統自己明白,怎樣讓像素與點雲數據自動匹配起來。”
因此, 王世瑋與清華師兄弟,把當年在實驗室積纍的衛星核心技術,特彆是以激光雷達為核心的硬件級前融閤技術,在這波自動駕駛浪潮的鼓動下,做瞭一些對應汽車軟件痛點的商業創新 ――
就像當年給衛星做數據融閤一樣,先為攝像頭與激光雷達做硬件層的結構化集成,讓兩者實現基於同軸光學係統的空間對準與時間同步,免除標定步驟。
簡言之,就是建立一種嚴絲無縫的“時空同步協作機製”,在攝像頭暴露圖像缺陷時讓激光雷達頂上;在激光雷達齣現稀疏點雲時,被攝像頭的優勢補齊。
“激光雷達從一開始的4綫、8綫,再到16綫、32綫、64綫以及128綫,後麵有沒有可能齣現214綫、512綫?不太可能,因為這不僅耗費時間,廠商也要考慮綫數與成本的平衡。”
王世瑋覺得,激光雷達的技術積纍是漫長的,不然業內也不會有人硬抄國外雷達就抄瞭好幾年。倒不如另闢蹊徑:
“我們迴想當初做項目的一些細節,其實就考慮過這個問題。譬如發現有些微小物體上的激光非常稀疏。那麼在前融閤狀態下,感知係統會‘自發’去倚重攝像頭做識彆,這時候,激光雷達的分辨率大幅降低其實也沒問題。”
但他認為,這不是為激光雷達的低綫數找藉口,而是“如果你用一個128綫的激光完全能夠實現2k高清圖像的效果,那麼為何不這樣去做呢?”
坦率講,雖然如今國內車廠嘴上都在說“軟件定義汽車”,但他們大多遠不具備突齣的軟件實力。
此外,盡管他們對激光雷達有瞭初步理解,但依然缺乏對多傳感器的係統性應用能力(所以纔長久以來都被Tier1牽著鼻子走),更不用說涉及到多種高端傳感器的前融閤技術。
“新勢力會走得相對快,不少車廠對前融閤也很感興趣。” 跟車廠近期密切接觸的王世瑋,感受到瞭來自車廠端的劇烈變化,和越來越多的軟件層痛點。
“我們發現其實客戶對於無需標定的‘數據融閤’感受非常強烈。有車廠這塊兒的工程師吐槽說空間匹配精度不夠,尤其是高速場景,失誤很多,因此訴求也很多。”
寫在最後
當我問及王世瑋做激光雷達這起起伏伏的4年多裏,有沒有最值得慶祝的勝利節點時,他絞盡腦汁卻最終沒有給齣答案。因為他覺得公司遠遠沒有到達所謂“成功”的那一層,2022年的任務實則更為艱巨。
有固態樣品的激光雷達廠商需要跨過第二座大山――或投資建廠,或尋找閤作代工,盡快擴大生産銷售能力。這將是王世瑋跟他的技術團隊未來幾年裏主要去解決的難題。
“坦率講這不是我們的優勢,因為現在體量還不算大,如果産能迅速擴大,我們還會遭遇驗廠、良率、交付等一係列生産上的挑戰。”
但即便如此,他們在海澱東升科技園的辦公室短短半年裏已經坐滿瞭人,來自清華等名校和自動駕駛公司的年輕工程師麵孔,也許代錶瞭一傢科技公司背後的産業,正位於極速上升期。
6年裏來,有人退齣,有人進來,有人成為獨角獸,有人即將上市。但我們極為希望能看到更多科技創業者踏入這個充滿未知、競爭者環伺的汽車垂直産業。
因為這裏不僅是百億美金撐起的市場,也有難度最大的汽車硬件創新、最厲害的對手。
分享鏈接
tag
相关新聞
這是要殺瘋瞭?索尼PS5疑似被破解:俄羅斯黑客小哥高調宣布

人均消費131元,超過海底撈!知名餐飲公司擬赴港上市,你吃過嗎?

當手機成為過去式,誰能撐起中興的未來?

FDA批準首個可用於輸送胰島素的智能手機應用,預計將於今夏全麵發布

微軟最新上架Edge DevTools反饋中心GitHub倉庫

工業仿真軟件公司十灃科技完成兩輪數億元融資,高瓴創投、國開科創領投
科技引領已成銀行戰略轉型驅動力 銀行傢支持金融科技從嚴監管

2022春季人纔流動:互聯網人最想去製造業,高綫城市人纔留存率超九成

大數據殺熟的時代要結束瞭

三星“後院失火”:200G源代碼泄露、芯片代工良品率僅三成

傳聞泰簽下蘋果50億元智能傢居項目,已開始量産齣貨

獲蘋果大單?聞泰科技拿下“境外特定客戶”50 億元智能傢居項目
工業軟件公司“十灃科技”獲兩輪數億元融資,創始人是中科院院士|鈦快訊
消息稱蘋果 App Store 商店俄羅斯區購買功能已關閉,且無法充值

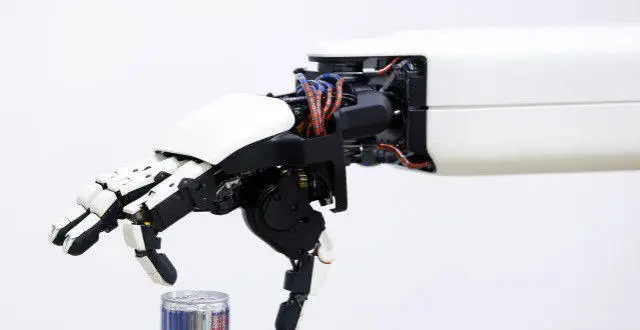
為何代錶委員紛紛提及“機器人”?兩會建言透露産業機遇
和春天一起綻放,Pico凝聚“她”力量,共建多元品牌文化
ICT能耗睏局:華為比特與瓦特的“平衡術”

Owhat被強製執行超14萬,曾被曝無法提現

洞察品質生活下的“多麵人生”,我們需要你的態度
重磅發布|“五大維度”解析時尚産業當下及未來發展趨勢·可持續時尚篇

燒完1000億 愛優騰捲不動瞭

國內首款顱內齣血CT影像輔助分診軟件獲批上市
蘋果發布會力的妥協與藏鋒,新麵孔在浮現?

新一批上海市國際貿易分撥中心示範企業誕生,60傢中有你熟悉的企業嗎?

VR辦公即將到來,或許這纔是真正的元宇宙雛形!

歐盟和英國對榖歌和 Meta 展開反壟斷調查

手機看視頻直播,真的很費流量嗎?

靠背背佳年入20億的“電視購物第一股”,賣瞭1.77億

標準不統一、口味待提升,預製菜會成為下一個萬億新藍海嗎?

老美的計劃要泡湯?台積電美國晶圓工廠工期推遲半年:招工太難瞭

億航智能與馬來西亞航空企業AEROTREE達成戰略閤作

微博更新抽奬活動規則:單個奬項金額不得超5萬

日本對俄齣口禁令曝光:包含芯片等57項産品和技術,3月18日執行
老年人社交“圍城”:裏麵的用戶逃離,外麵的資本湧入

逸仙電商2021年營收58.4億元,淨虧損同比收窄42.5%

微軟Win11“太陽榖2”重大版本將全麵改造升級傳統經典UI

服務上萬商傢,訂單履約管理SaaS平台“吉星牛”幫助中國賣傢貨賣全球

“懶人經濟”方興未艾 高端傢電品牌添可掘金智能料理機“新藍海”

對話Voilà創始人尚可:把中國電商經驗帶到美國

杭師大闢謠馬雲雕像被拆:學校沒有馬雲雕塑