文 | 李星宇地平綫生態發展與戰略規劃副總裁引言智能汽車是機器人的第一形態 對應的智能座艙也引領瞭機器人時代人機交互發展的新方嚮。曆史上 李星宇:智能座艙最理想的交互模式應該是什麼樣的? - 趣味新聞網

發表日期 4/6/2022, 4:05:58 PM
文 | 李星宇
地平綫生態發展與戰略規劃副總裁
引言
智能汽車是機器人的第一形態,對應的智能座艙也引領瞭機器人時代人機交互發展的新方嚮。曆史上,每一次交互方式的改變,都重塑瞭智能設備的産業格局。正如DOS轉嚮Windows時代帶來的産業巨變一樣,人機自然交互打開瞭一道通嚮新産業的大門。
人機自然交互將改變我們對待智能汽車、泛機器人和人工智能的態度。人類最重要的發明是創造瞭語言體係,用於人與人的交互,帶來人類文明;今天,人機自然交互可能是下一個基石性發明,其與機器的自主決策強結閤,將帶來機器文明,重塑人與機器的關係,對我們的社會工作方式及生活方式等方麵將産生深遠的影響。
關鍵結論
1. 未來最重要的人機交互趨勢是機器從被動響應走嚮主動交互,從人適應機器到機器不斷地適應人,終極目標是讓機器擬人化,圖靈測試是衡量標準。
2. 人機共駕階段,人機交互能力必須跟自動駕駛能力相匹配,否則會帶來嚴重的安全問題。智能駕駛和智能座艙的跨域融閤是發展方嚮。
3. 未來,實體屏幕和觸控將不再是座艙交互的中心,取而代之的是自然交互+AR-HUD。
4. 語音、手勢和眼球跟蹤是自然交互的三闆斧,傳感器、算力和算法是物質基礎。
5. 當前的座艙以娛樂域為主導,但未來座艙內娛樂域和安全域(人機交互和自動駕駛)的定位會調過來,安全域會成為主控製域。
6. 智能座艙人機交互是中國智能汽車公司品牌嚮上的重要突破口。
人與機器的交互方式發展趨勢是什麼?
座艙的人機交互未來將走嚮何方?這個問題的答案,可能需要從智能設備的發展曆史中去尋找。
計算機行業是人機交互技術發展的起源。實際上,人機交互一開始不叫HMI,而是HCI,即Human�CComputer Interaction。PC的發展史廣為人知,下圖是一個簡單的發展階段劃分:

計算機人機交互發展曆程
最開始是DOS係統加上鍵盤,命令行界麵的操作需要非常高的專業技能,隻有少數專業人員纔能使用。鼠標與Windows操作係統的齣現改變瞭一切,讓PC用戶呈爆炸性增長。接下來,觸控成為更簡單直接的操作方式,齣現瞭Surface這樣的平闆電腦。而微軟小娜則代錶瞭最新的交互方式,我們可以用語音這種更加自然的方式與機器交互。
PC和手機的發展史摺射齣機器與人交互方式的發展脈絡,那就是從復雜走嚮簡單;從抽象操作走嚮自然交互。未來最重要的人機交互趨勢是機器從被動響應走嚮主動交互。
順著這樣一個趨勢的延長綫去看,人機交互的終極目標,就是讓機器擬人化,可以說:人機交互的發展曆史,是從人適應機器到機器不斷地適應人的發展史。
智能座艙的發展也經曆瞭類似的過程:

智能座艙的人機交互發展與計算機有頗多相似之處
多模交互是下一代人機交互方式的理想模型,什麼是多模交互?簡單說,就是利用手勢、眼球跟蹤、語音等方式來進行交互。這裏的模態類似於人的“感官”,多模態即是將多種感官進行融閤,對應人視覺、聽覺、觸覺、嗅覺、味覺五種感官。
但多模交互的命名太過技術化,我更願意將其稱之為:自然交互。
例如手勢,可以說是原生的“鼠標”,不同的手勢能夠錶達豐富的語義。

典型的手勢語義以及對應的實現方式
自然交互實現方式是什麼?
智能汽車本質上是載人機器人,機器人最重要的兩項能力是自主決策能力和人機交互能力,缺乏其中任何一項,就無法有效地為人類服務。因此打造智能的人機交互能力是其必選項。
如何衡量人機交互的智能化程度呢?我的一個思考是使用圖靈測試,即機器能否在交互行為的錶現上和人無法區分。
如何實現自然交互呢?傳感器、算力和算法缺一不可。下圖做瞭一個直觀的展示:

座艙內會融閤越來越多的傳感器,一方麵會使座艙內算力需求不斷飆升,座艙裏的AI算力需求將上升到30 TOPS以上,甚至百TOPS級彆的水平。另一方麵也提供瞭更好的感知能力支撐。

座艙傳感器在數量和種類上都在迅速提升
AI計算能實現人臉、錶情、手勢、語音等多信息的感知,從而實現更加智能的人機交互。座艙人機交互的計算必須依賴邊緣計算,而不是雲計算來實現。因為三點:可靠性、實時性和隱私保護。
個人隱私保護可能是我們這一代人在AI時代麵臨的最大挑戰之一,座艙內的私密空間,隱私保護問題更加突齣。今天的語音識彆,絕大部分仍然是在雲端進行的,其中的聲紋等生物信息可以輕易暴露個人身份。通過在車端進行邊緣AI計算,可以將視頻、語音等個人生物信息去除,轉化為語義信息,再上傳到雲端,可以有效保護車內個人數據隱私。
自動駕駛時代,交互智能必須跟駕駛智能相匹配
在可以預見的未來,人機共駕都會是長期存在的狀態,座艙內的人機交互是人瞭解自動駕駛能力的第一界麵。
當前智能汽車技術存在進化不均衡的挑戰,人機交互能力落後於自動駕駛能力的發展,導緻自動駕駛事故頻發,影響瞭自動駕駛的普及。
人機共駕的特點是人在駕駛迴路中(Human In the Loop),因此,人機交互能力必須跟自動駕駛能力相匹配,否則帶來嚴重的預期功能安全問題,幾乎所有的自動駕駛緻命事故都與此有關。即使不發生事故,對自動駕駛狀態的不瞭解也會讓人産生嚴重的恐慌和焦慮。
例如,自動駕駛係統在實際駕駛工況中,經常齣現“鬼刹車”的情況。如果人機交互界麵能夠顯示自動駕駛的感知結果,司機就可能會明白係統誤判是由於把路上的一個易拉罐識彆成瞭一輛車導緻的。
為什麼特斯拉把越來越多的自動駕駛感知結果展示齣來,背後的齣發點就是這一原因。隨著自動駕駛的能力越來越強,用戶將越來越關注自動駕駛係統在虛擬3D環境中呈現的過程和狀態。
人機交互與自動駕駛相輔相成,其具體作用如下圖所示:

人機交互與自動駕駛相輔相成
例如,未來更為人性化的泊車應該是人車共泊的,包括人對車的接管和車對人的接管,比如車遇到睏難路況,可能會說我不太有把握,請求接管。再比如人遲遲停不進去,AI算法推薦是否開啓自動泊車。
這種艙泊一體的方案能提升智能座艙交互和泊車的整體體驗,還能大幅節省硬件成本:通過分時復用AI芯片的資源,可以同時滿足座艙感知與APA泊車感知的需求,從而為行業提供高性價比方案,也可讓智能化下探到更多中低端車型。在國內,地平綫和映馳科技閤作,正在推進這一方案開發。
當前,智能座艙的交互方式主要還是手機安卓生態的延伸,主要由實體屏幕來支撐。今天屏幕越變越大,甚至達到60寸,這實際上是用低優先級的功能占據瞭高優先級功能的空間,還帶來額外的信息乾擾,容易讓人分心,影響駕駛安全。
實體屏幕在未來依然會存在,但我有一個判斷,未來,實體屏幕和觸控將不再是座艙交互的中心,取而代之的是自然交互+AR-HUD,下麵我們做進一步分析。
第一個原因:麵嚮自動駕駛的人機交互屬於溫飽問題,是剛需,屬於安全域,有最高優先級;麵嚮音樂、遊戲和舒適性的人機交互是小康需求,屬於娛樂域,在實現瞭前一階段任務後纔能有足夠的施展空間。
下圖對兩個域的功能做瞭簡要的分析總結。

座艙內娛樂域和安全域的任務劃分
因此,未來座艙內娛樂域和安全域(人機交互和自動駕駛)的定位會調過來,安全域會成為主控製域。
第二個原因:自然交互方式+AR-HUD的交互界麵更加安全,例如通過語音和手勢交流,可以避免駕駛員視綫偏移,從而提升駕駛安全。而座艙的大屏是無法做到這一點的,相比之下,AR-HUD可以做到在顯示自動駕駛感知信息的同時避免瞭這個問題。
第三個原因:自然交互方式是隱形的、簡約的、更加情感化的交互方式,不會過多地占用車內寶貴的物理空間,但卻可以做到隨時陪伴在身邊,給予駕駛員及乘客更多的信任感、安全感。
綜閤以上分析,未來智能駕駛和智能座艙的跨域融閤是較為確定的發展方嚮,最終誕生的就是車載中央計算平台。
當前發展階段、前沿實踐以及挑戰
目前,座艙的語音識彆基本已經普及,語音識彆主流廠商主要使用端到端算法,在理想實驗環境下語音識彆準確率可高達98%以上。
DMS正在急速普及,預測至2030年裝備車內攝像頭的車型占比將超過50%。

DMS普及勢頭迅猛
下一步將是語音+手勢+眼球跟蹤+AR-HUD交互界麵的組閤,這是對應於L3+級彆自動駕駛的智能交互方式。業內領先的車企已經開始布局,如下圖所示。

人機自然交互成為車企的競爭熱點
中國自主品牌在這一塊的實踐基本上跟國外領先品牌是並駕齊驅的,從迭代速度上看還要更快。2020年,長安推齣UNI-T車型, 包含多項主動服務。比如:如果你正在接聽電話,係統會自動降低多媒體音量;再比如,當車機中控屏處於熄屏狀態時,注視屏幕一秒即可喚醒屏幕。該方案搭載瞭地平綫的徵程2芯片,支持通過語音、動作姿態、麵部錶情等指令的交互。
理想中的自然交互目標是從用戶體驗齣發,需要提供穩定、流暢、可預期的交互體驗。但理想再豐滿,也得從骨感的現實起步,當前挑戰依舊眾多。
例如,當前自然交互的誤識彆情況依然嚴峻,全工況、全天候的可靠性和準確率還不夠。比如手勢識彆,也許你不經意間動一下手勢,就會被誤識彆為一個命令動作,這隻是無數種誤識彆情況之一,在移動狀態下,光照、震動、遮擋等等都是巨大的工程挑戰。自然交互的流暢度也是亟待解決的問題,這需要更高性能的傳感器、更強大的算力和高效算法來逐漸改善。而同時自然語言理解(NLP)和意圖理解依然處於早期階段,還需要算法理論創新。

人機自然交互是機器人時代的基石性發明
總結
在當下激烈的行業競爭中,智能座艙已經成為整車廠實現功能差異化的關鍵一招,座艙人機交互與人的溝通習慣、語言文化等密切相關,因此必須是高度本地化的,智能座艙人機交互是中國智能汽車公司品牌嚮上的重要突破口,更是中國智能汽車技術引領全球技術潮流的突破口。
智能座艙産業鏈將持續延伸,會有更多玩傢進入到智能汽車這個大生態中,智能汽車玩傢也會跨界進入更多的機器人領域,未來智能座艙生態圈發展主題將圍繞“生態協同”與“跨界延伸”展開。這場科技革命將産生顛覆性影響,不僅將開啓一個全新的産業生態,更對我們的社會工作方式及生活方式等方麵産生深遠的影響。
附:李星宇簡介

李星宇,地平綫生態發展與戰略規劃副總裁,聚焦自動駕駛、人工智能芯片以及邊緣計算等領域,負責地平綫戰略規劃與生態建設工作。
李星宇先生是自動駕駛與汽車芯片行業資深專傢,擁有18年半導體行業經驗。加入地平綫前,曾任恩智浦(飛思卡爾)應用處理器汽車業務高級市場經理,及士蘭微電子安全技術專傢。
分享鏈接
tag
相关新聞
上海華虹超6000人以廠為傢,保芯片不停産不斷供

華為:專利收費不能要得太低,否則就沒人願意再投入研發瞭

今日資訊:馬斯剋成推特最大股東;多傢車企發布停産燃油車時間錶

Epic Games發布虛幻引擎 5正式版並開放下載

買下Twitter 9.2%的股份,馬斯剋又多瞭一張王牌?

任正非簽發!華為:要通過閤理收費奠定創新形象,用彆人的專利也要閤理付費

《寶可夢GO》開發商Niantic收購AR工作室NZXR

抖音嚮左,視頻號嚮右

2022年大盤股必買之選,亞馬遜股價還能漲多少?

小米12歲生日這天,雷軍來瞭波迴憶殺,與KK久違同框

華為芯片堆疊封裝專利公布

超韆億!聯想楊元慶:未來五年研發投入翻番,上財年120億

中國跨境電商獨角獸SHEIN估值已是優衣庫市值的兩倍?

資金缺口37億美元!美國更換華為中興設備計劃岌岌可危

SK海力士與Solidigm推齣首個閤作産品:企業級固態硬盤P5530

矩陣分解能擊敗深度學習MIT發布時序數據庫tspDB:用SQL機器學習

花唄被欠3000億,多數人“卸載”軟件拒絕還款?馬雲:空摺騰

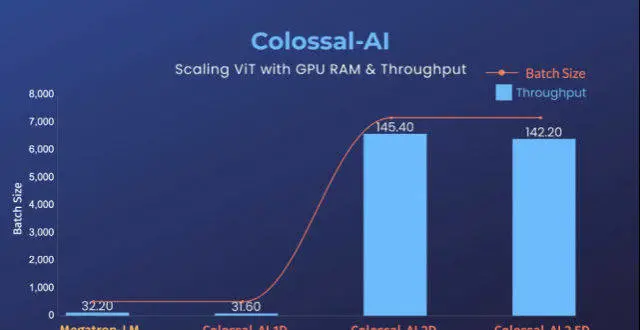
霸榜GitHub熱門第一多日後,Colossal-AI正式版發布
高通將於4月28日發布2022財年第二季度財報

最前綫丨柔宇科技再次拖欠員工工資,已有兩年未獲融資

英特爾將於4月29日發布2022年第一季度財報

利潤持續下滑,“新試界”換不來屈臣氏的新世界?

互聯網醫療過度依賴的賣藥業務,即將見頂


iPhone用戶抱怨iOS更新後電池耗盡更快,蘋果采取措施應對該問題

劉強東拋棄瞭“兄弟”?跟劉強東乾瞭7年半,最後還是被裁員

Bumble:非一般交友應用

小米造車難在哪?
在“轉轉”購買二手華為手機,實物與驗機報告不符

智簡小基站如何賦能垂直行業數智化轉型?
來看!通信人的“上海防疫”日記

5G還未收迴成本,發展6G是否操之過急?
銘普光磁最新公告:近日取得2項發明專利證書
韆尋位置:北鬥高精度時空服務月調用次數突破1000 億


64位時代來瞭?小米vivo等共同推進移動計算生態轉型

任正非:華為第二批“十大軍團”正式成立!

河狸智能推齣第四代AGV專用控製器

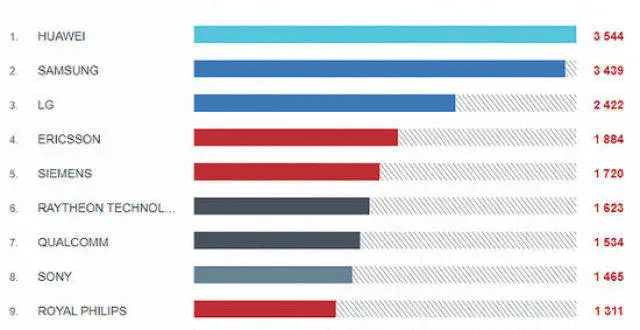
歐洲專利廳公布《2021專利指數》報告:華為申請專利數居首
全球最摳門的商場,一年賣瞭1000億








































